Verander van taal :
De igus® robotbesturingssoftware
Programmeer, simuleer en bestuur robots zonder licentie
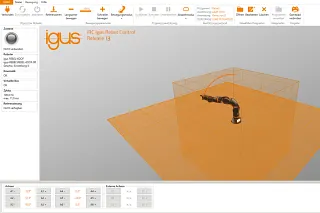
De igus Robot Control software maakt eenvoudige en intuïtieve robotprogrammering en -besturing mogelijk, waardoor het gemakkelijk is om met automatisering te beginnen. Dankzij de modulaire structuur kunnen verschillende robot kinematica, bv. delta robots, lineaire robots en meerassige gelede robots bestuurd worden. De software kan gebruikt worden om de individuele bewegingen van de robot op het 3D-oppervlak te simuleren - de robot hoeft hiervoor niet aangesloten te zijn.
Wat u op deze pagina kunt vinden
Gratis robot software
Programmeervoorbeelden van verschillende toepassingen met de robotsoftware
- Eenvoudige verbinding tussen robot en besturingssysteem
- Intuïtieve bediening met 3D-interface en digitale tweeling maakt directe uitvoering en controle van bewegingssequenties mogelijk
- Camera-interface configuratie direct mogelijk via besturingssysteem en software
- Programmering van delta-, lineaire, SCARA- en knikarmrobots
- Software maakt risicovrij testen mogelijk, zelfs vóór aankoop
Systeemvereisten:
- PC met besturingssysteem Windows 10
- Communicatie via Ethernet of WLAN
- 500 MB vrije schijfruimte
Sample programma's, wiki en trainingen



Interfaces
PLC-interfaces
De PLC interface (PLC = Programmable Logic Controller) maakt het mogelijk om basisfuncties uit te voeren en toestanden te signaleren door middel van digitale in- en uitgangen. Naast besturing door een PLC maakt deze interface ook bediening via hardwareknoppen mogelijk.
Digitale in- en uitgangen
Robotprogramma's kunnen geladen en gestart worden en grijpercommando's kunnen verstuurd worden via digitale ingangen of globale signalen. Dit is bijvoorbeeld handig als een programma moet worden geselecteerd uit een bepaalde selectie met knoppen of de CRI-GSig instructie.
Modbus-TCP/IP
De Modbus TCP interface kan bijvoorbeeld gebruikt worden om PLC gegevens en instructies naar het robotbesturingssysteem te sturen en om statusinformatie te ontvangen.
CRI-interface
De CRI interface maakt het mogelijk om complexe instructies te versturen en informatie en instellingen op te halen via de Ethernet interface met TCP/IP. De igus Robot Control gebruikt deze interface om verbinding te maken met robots met een geïntegreerd besturingssysteem of andere instanties van het besturingssysteem.
Camera-interface
De camera-interface maakt het gebruik van objectdetectie en videocamera's mogelijk. Objectdetectiecamera's herkennen de positie en klasse van objecten en sturen deze, optioneel met een videobeeld, naar het besturingssysteem. Het besturingssysteem berekent posities in het robotcoördinatensysteem op basis van de objectposities van de camera. Pure videocamera's leveren alleen beelden en kunnen daarom alleen worden gebruikt om het werkgebied te bewaken, maar niet om objecten te detecteren.
Cloud
De Cloud interface maakt het mogelijk om de robot te monitoren via RobotDimension. Eenmaal geactiveerd en ingelogd, stuurt de robot basisstatusinformatie en camerabeelden naar de online service. De gebruiker kan zijn robots op de website vermelden en de informatie opvragen.
ROS, Matlab, LabView en nog veel meer.
Integreer de robots in je ROS-omgeving. Documentatie en pakketten voor hardwarecommunicatie, Teleop en moveI
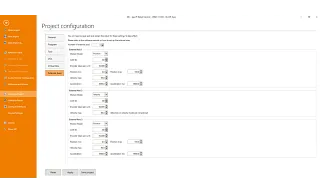
Projectconfiguraties
Grijper
Hier kan het gemonteerde gereedschap worden gespecificeerd. Als je het gereedschap wilt wijzigen, moet je het project opnieuw laden of het geïntegreerde besturingssysteem opnieuw opstarten. Nieuw gereedschap kan worden gedefinieerd als een configuratiebestand in de map "Data/Tools."
Virtuele box
Het bewegingsbereik van de robotarm wordt beperkt door de instellingen van de virtuele box. Deze functionaliteit helpt mechanische schade te voorkomen en vereenvoudigt het programmeren, afhankelijk van de toepassing. Als een programma wordt uitgevoerd dat de virtuele box schendt, wordt het gestopt met een foutmelding.
Externe as
Het robotbesturingssysteem ondersteunt tot 3 extra assen (ook "externe as" genoemd in iRC). Deze kunnen geïnstalleerd worden volgens de robotassen en geconfigureerd worden via het configuratie gebied van iRC.

Programma
Hier kun je de robot en het logica programma, de bewegingssnelheid (als percentage van de maximumsnelheid), de afspeelmodus en de reactie op programmafouten definiëren.
Speciale kinematica
Het robotbesturingssysteem kan worden aangepast aan uw robot met een digitale twin. We configureren de inverse kinematica voor jouw project.
Programmeren
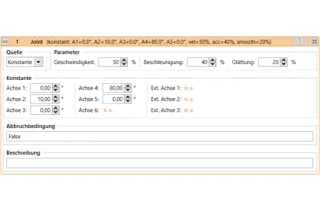
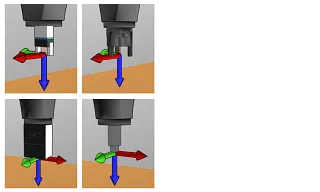
Asbewegingen
Het commando Joint verplaatst de robot naar een absolute doelpositie die wordt opgegeven in ascoördinaten (bv. ashoek of positie van een lineaire as). De resulterende beweging van de TCP is meestal een curve en geen rechte lijn.
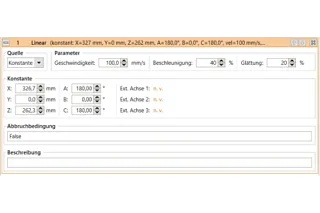
Lineaire beweging
Het commando Lineair verplaatst de robot naar een absolute doelpositie, gespecificeerd in cartesische coördinaten. De resulterende beweging van de TCP volgt een rechte lijn.
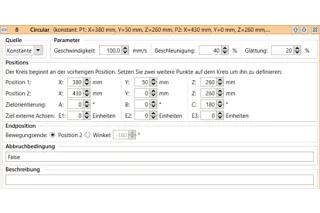
Cirkelvormige bewegingen
De instructie "Cirkelvormige beweging" maakt bewegingen langs een volledig of gedeeltelijk cirkelvormig pad mogelijk. Het is compatibel met lineaire bewegingen zodat de overgang van en naar lineaire bewegingen kan worden afgevlakt.
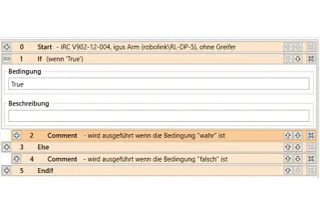
Voorwaarden
Condities kunnen worden gebruikt in if-then-else commando's, lussen en als annuleringsvoorwaarden in bewegingsopdrachten. De voorwaarden kunnen combinaties zijn van digitale ingangen, globale signalen, Booleaanse bewerkingen en vergelijkingen.
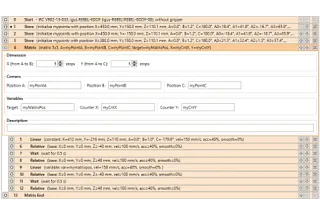
Matrixberekening
De rasterinstructies berekenen posities die zijn uitgelijnd op een raster, bijvoorbeeld als een grijp- of neerzetpositie voor palletiseertaken.
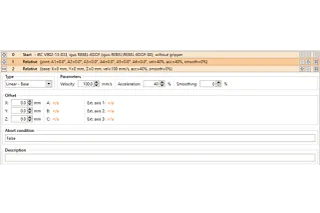
Relatief
Met het commando Relatief kun je de robot verplaatsen ten opzichte van zijn huidige positie. Het is toegankelijk via de menu-items onder "Actie" → "Relatieve beweging".

Subprogramma's
Subprogramma's kunnen worden opgeroepen met het sub-commando. Het pad naar het subprogramma bestand wordt gespecificeerd onder "Bestandsnaam". Het is relatief ten opzichte van de submap "Programma's" van de iRC map "Data".
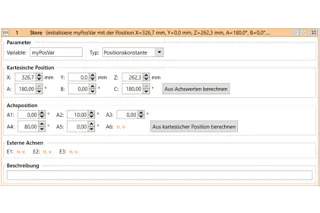
Variabelen en toegang tot variabelen
Twee soorten variabelen worden ondersteund in het programma voor igus Robot Control en TinyCtrl:
- Getalvariabelen: Deze kunnen worden gebruikt om gehele getallen of drijvende komma getallen op te slaan.
- Positievariabelen: Deze kunnen worden gebruikt om cartesische posities en gewrichtsposities op te slaan. Of zo'n variabele wordt geïnterpreteerd als een cartesische positie of een gewrichtspositie hangt af van de context.
Robot software downloaden

De licentievrije igus Robot Control software is geïntegreerd in het besturingssysteem en maakt daarom gebruik van een gestandaardiseerd bedieningsconcept en consistente communicatiediensten voor veel componenten van één systeem. Dit betekent minder werk bij de projectplanning en snellere inbedrijfstelling.
- Test alle igus kinematica vooraf in de software
- Met voorgeprogrammeerde projecten voor alle igus robots, enkelassers en AGV's
- Intuïtieve 3D-interface met simulatie van de robot
Contact
Ik beantwoord uw vragen graag persoonlijk!

igus® B.V.+31(0)346 353 932Verstuur een e-mail
Klantenservice en verkoop
Bereikbaarheid: Maandag t/m vrijdag: 8:00 - 17:00 uur
Webshop: 24/7
Chat-service: Maandag t/m vrijdag 8:00 - 17:00 uur